

如果是現實的世界,想要看到物件的另一面,觀察者只要移動自身到另一邊就可以了:
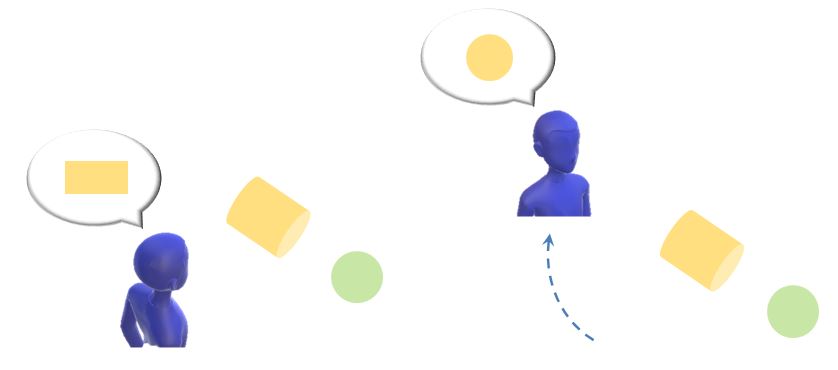
然而在 3D 繪圖時,觀察者總是在螢幕前方看著繪製出來的 3D 物件,螢幕是平面的,是要怎麼繞到另一邊觀看啦!
在 3D 繪製時想要實作出觀察者移動的效果,實際上移動的是物件,只要令物件做出相對於觀察者的移動,看起來就會像是觀察者在移動了,其實在〈動態反射、天空盒〉中談到,如何製作 720 度景像觀看時,就做過這件事了,當時就說到,實際上在轉動的是裁剪空間中的一個矩形。
也就是說,如果想做出觀察者往前走的效果,實際上就是物件往觀察者的方向移動,如果想要做出觀察者繞著物件順時針走動,就是令物件逆時針轉動,也就是說,物件的每個頂點,都要做出相反的轉換運算。
為了要能對頂點做出相對應的轉換運算,必須決定觀察者的位置,觀察者看向哪個點,以及觀察者頭頂的方向,因為觀察者可能會歪著頭看,許多文件會以相機作比擬,這時指的就是相機的上面朝向哪個方向,然而有的程式庫中有個相機之類的物件,而這類物件往往包含了投影的效果在裏頭,為了避免混淆,這邊就還是用觀察者來說明。
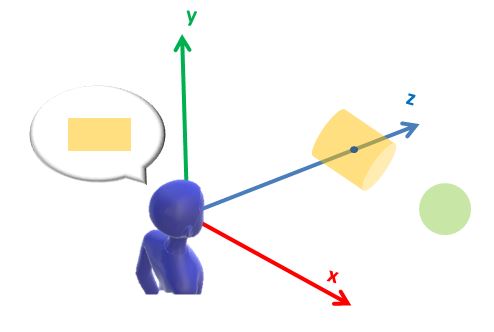
到目前為止,文件都是以裁剪空間為基礎在定義頂點,而觀察者的位置,觀察者看向哪個點,以及觀察者頭頂的方向,決定了一個以觀察者為中心的座標系統,以裁剪空間為基礎定義的頂點,必須轉換為觀察者的觀點下看到的頂點座標。
例如,以下為基於觀察者的座標系統:
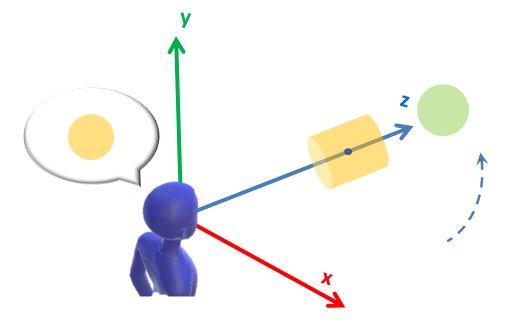
如果想要繪製出觀察者順時針走動到另一面的效果,全部的物件就必須以觀察者看向的點逆時針轉動:
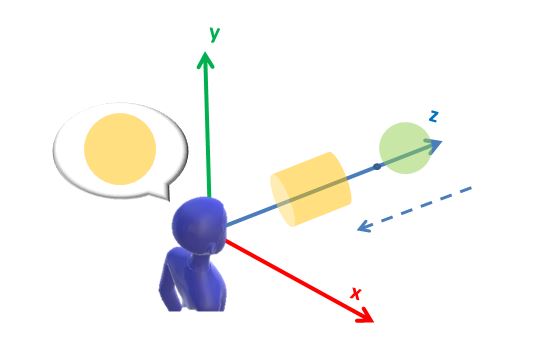
如果想做出觀察者向物件走近的效果(而看向的點不變),就要令全部的物件往觀察者所在位置移動:
在〈電腦圖學入門〉的〈太空船座標旋轉〉中,我談過 2D 的情況下,如何導出座標轉換公式,不過,在 3D 的情況下,使用向量來思考會比較方便,也可以結合矩陣運算。
觀察者的座標系統中三個軸,可以使用向量 (x0, x1, x2)、(y0, y1, y2)、(z0, z1, z2) 來表示,x0, x1, x2、y0、y1… 等值,目前具體來說,就是基於裁剪空間座標而訂,不過實際上,是基於一個不變的世界空間而定,只不過目前裁剪空間與世界空間是直接對應的,之後會談到世界空間。
不過,因為撰寫程式時,要同時指定三個向量有點麻煩,因此只會指定觀察者頭頂方向的向量,z 軸向量會由觀察者位置、觀察者看向哪個點計算得到,而 x 軸向量,會使用觀察者頭頂方向的向量與 z 軸向量的外積得到,最後 y 軸向量會使用 x 與 z 的外積得到,三個軸的向量,會規範為長度為 1。
因此,如果有個 normalize 函式:
normalize(v) {
const len = Math.hypot(v[0], v[1], v[2]);
if (!len) {
return [0, 0, 0];
}
return [v[0] / len, v[1] / len, v[2] / len];
}
若 eye、center、up 分別為觀察者位置、看向的中心、頭頂方向的向量,哪麼就可以寫個 lookAt 函式:
lookAt(eye, center, up) {
const [eyex, eyey, eyez] = eye;
const [upx, upy, upz] = up;
const [centerx, centery, centerz] = center;
const [z0, z1, z2] = this.normalize([
centerx - eyex,
centery - eyey,
centerz - eyez
]);
const [x0, x1, x2] = this.normalize([
upy * z2 - upz * z1,
upz * z0 - upx * z2,
upx * z1 - upy * z0
]);
const [y0, y1, y2] = this.normalize([
z1 * x2 - z2 * x1,
z2 * x0 - z0 * x2,
z0 * x1 - z1 * x0
]);
... 建立觀察矩陣
}
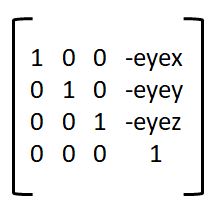
現在已經有了 (x0, x1, x2)、(y0, y1, y2)、(z0, z1, z2) 了,來看看怎麼轉換物件的座標,首先把觀察者位置作為原點,觀察者 x、y、z 三個軸方向先與世界空間(目前等同於裁剪空間)相同,物件相對於觀察者的座標就會原本的座標分別減去 eyex、eyey、eyez,也就是轉換矩陣會是:
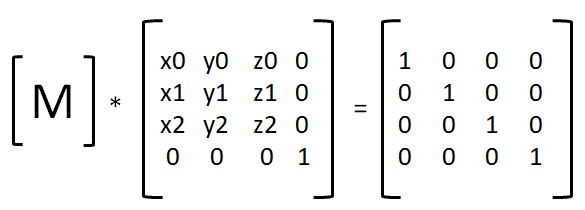
接下來要處理觀察者 x、y、z 實際的三個軸方向,假設這需要一個矩陣 M,因為是這個矩陣若遇到點 (x0, x1, x2),必須得到 (1, 0, 0) 的值,遇到點 (y0, y1, y2),必須得到 (0, 1, 0) 的值,遇到點 (z0, z1, z2),必須得到 (0, 0, 1) 的值(因為這三點分別就是在觀察者座標軸的 x、y、z 軸上,而這三個點原本代表三個向量,長度為 1)。
也就是說 M 會有這個關係:
因為乘號右邊是個正交矩陣(Orthogonal matrix),正交矩陣的反矩陣就是轉置矩陣,如果乘上這個反矩陣:

最後就是得到:
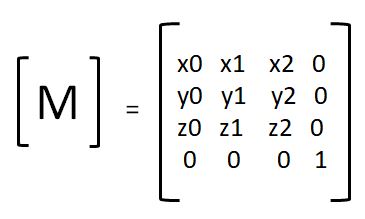
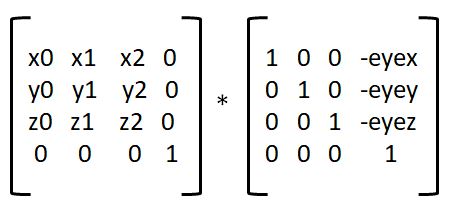
因此,觀察者矩陣就是:
現在就可以把方才的 lookAt 實作完成了:
lookAt(eye, center, up) {
const [eyex, eyey, eyez] = eye;
const [upx, upy, upz] = up;
const [centerx, centery, centerz] = center;
const [z0, z1, z2] = this.normalize([
centerx - eyex,
centery - eyey,
centerz - eyez
]);
const [x0, x1, x2] = this.normalize([
upy * z2 - upz * z1,
upz * z0 - upx * z2,
upx * z1 - upy * z0
]);
const [y0, y1, y2] = this.normalize([
z1 * x2 - z2 * x1,
z2 * x0 - z0 * x2,
z0 * x1 - z1 * x0
]);
return [
x0, y0, z0, 0,
x1, y1, z1, 0,
x2, y2, z2, 0,
-(x0 * eyex + x1 * eyey + x2 * eyez), -(y0 * eyex + y1 * eyey + y2 * eyez), -(z0 * eyex + z1 * eyey + z2 * eyez), 1
];
}
可以這麼使用 lookAt 函式:
let lookTrans = mat4.lookAt([0, 0, 0], [0, 0, 1], [0, 1, 0]);
得到觀察矩陣後,之後就可以進行各種轉換了,例如:
let transformation = mat4.zRotate(lookTrans, 0.025);
transformation = mat4.translate(transformation, 0.25, 0, 0);
transformation = mat4.xRotate(transformation, 0.5);
transformation = mat4.yRotate(transformation, 0.5);
renderer.uniformMatrix4fv('transformation', transformation);
我提供了個範例網頁,可以點選滑鼠左鍵來變換觀察者的位置 y 座標,值會在 0.5 與 -0.5 之間變換,在 0.5 時,因為是在高處看,方塊會在畫面下方旋轉,-0.5 的時候就是在畫面上方旋轉。