

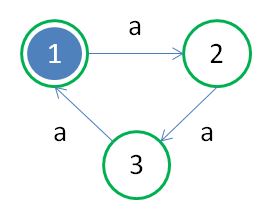
要識別某符號是否以 3 倍長度出現,可以使用有限狀態機實現,這在〈沒有記憶的機器〉就看過了:
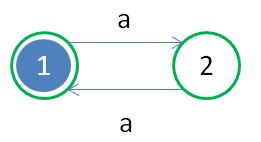
如果要識別某符號是否以 2 倍長度出現呢?簡單,只要將以上的機器拿掉一個狀態就可以了:
如果要設計一個識別某符號是否以 2 倍數,或者是 3 倍數出現的機器呢?如果使用有限狀態機,就目前你看過的設計方式來說,你做不到!不過,如果分別有以上兩台機器,加上一個人的話,可以先將輸入餵給其中一台,若機器處於不可接受狀態,再餵給另一台,若仍是不可接受狀態,那輸入的符號個數就不會是 2 倍數或者是 3 倍數!
然而,設計機器是為了將人的因素排除在外,有辦法將這兩台機器合併嗎?只要餵給它資料,中間不需要任何其他人為操作,就能知道機器接受或不接受字串?
簡單地將狀態 1 合併在一起呢?
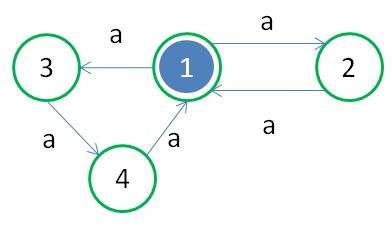
問題來了,在一開始狀態 1 時若輸入了 a,有兩個可遵循的規則,一個規則是轉移至狀態 2,另一個規則是轉移至狀態 3,那麼該用哪條規則?如果兩個規則各代表一個齒輪,而且還有個選擇規則用、馬達驅動的齒輪,也許這時用力地給馬達齒輪轉動一下,看看正好卡住哪個規則齒輪,就進入該規則的下一狀態,這樣的機器是能實作出來的。
因此,如果是 aaa,機器運行時正好選擇了進入狀態 3 的規則齒輪,接下來會回到狀態 1,YA! 運氣真好,機器接受了,同樣地,若是 aa,或許也能有同樣的好運氣!
只不過,如果是 aaaaa 呢?如果運氣不好,第一次在狀態 1 時選擇進入狀態 2,回到狀態 1 時又選擇了進入狀態 3,這機器接受了,這結果顯然不是想要的,這機器應該具有神蹟,每次都運氣夠好,選中正確的規則,令 aaaaa 輸入時不接受。
如果這種說詞不能令人滿意,就讓機器一但卡住某個規則齒輪,就不能回頭好了:
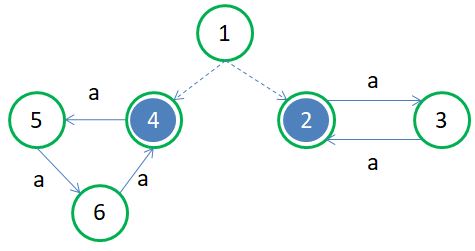
機器一開機,不讀取任何輸入就會馬上驅動馬達,看看卡上哪個規則齒輪,這稱為自由移動,如果卡上右邊的齒輪,而輸入符號正好是 2 倍長度,機器就接受了,類似地,若輸入是 3 倍長度,又正好卡上左邊的齒輪,機器也是接受了。
如果機器在某個狀態,有著兩條以上可遵循的規則(可以是相同輸入的兩條以上規則,或者是不讀取任何輸入的兩條以上的自由移動規則),就會有著這樣的非確定性,因而上述的機器,可以稱為非確定性有限自動機(Nondeterministic Finite Automata, NFA),相對地,之前文件中談到的有限狀態機,因為每個狀態下能遵循的規則都是確定無岐義的,稱為確定性有限自動機(Deterministic Finite Automata, DFA)。
現實中當然也沒有每次運氣都這麼好的神機,也就是說,設計不出這種等同於神蹟的演算法,實際機器會有運氣不好的時候,明明是 3 倍長度卻卡上右邊的齒輪,使得機器誤判這不是 3 倍長度的輸入,反之亦然,這種認清現實,接受運氣不好的機器,倒是存在的。
只不過運氣不好的時候,明明是符合規律,機器卻不接受的情況,這樣的機器,可以稱為運算機器嗎?就機器本身來說,增加這種瞎猜的不確定性,至少還有「可能」矇對,沒有這種不確定性,就什麼也沒有了,這樣的機器與其說是要求運算出「是」或「不是」,不如說是運算出「是」、「可能不是」,或者「可能是」、「不是」的答案,就上面的組態圖來說,答案會是「這是 2 或 3 倍數長度的文字」或「這可能不是 2 或 3 倍數長度的文字」。
這種說法好像是在說,非確定性有限自動機,有著確定性有限自動機沒有的運算能力,實際上,非確定性有限自動機沒有比較強,只是狀態比較少,規則比較少,一開始比較容易設計罷了。
這就好比有時候,可以選擇的太多,中間必須考慮的事也很多時,腦袋一時無法轉過來時,人們就會傾向簡單的解決方式,瞎猜、丟硬幣、抽籤等方式就會因應而生。
非確定性有限自動機可以轉換為確定性有限自動機!而且最後機器可以給出「是」或「不是」的答案,而非可能性的答案。
轉換的重點在於合併狀態為狀態集合,例如,在上面的自由移動情況下,實際上等同於機器進入一個包含 2 與 4 的「狀態集合」,接下來 2 可以轉換至 3,而 4 可以轉換至 5,等同於接受 a 之後,機器進入一個包含 3 與 5 的「狀態集合」,依此類推的話,可以設計出以下的確定性有限自動機:
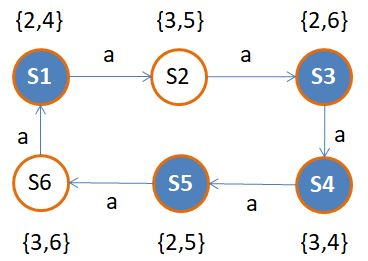
狀態集合中若包含著狀態 2 或 3,都是接受狀態,可以使用〈沒有記憶的機器〉中的程式來制定規則並看看是不是可以運算:
let manual = new Manual([
new Rule({
state : 'S1',
input : 'a',
nextState : 'S2'
}),
new Rule({
state : 'S2',
input : 'a',
nextState : 'S3'
}),
new Rule({
state : 'S3',
input : 'a',
nextState : 'S4'
}),
new Rule({
state : 'S4',
input : 'a',
nextState : 'S5'
}),
new Rule({
state : 'S5',
input : 'a',
nextState : 'S6'
}),
new Rule({
state : 'S6',
input : 'a',
nextState : 'S1'
})
]);
let fa = new FA(manual, 'S1', ['S1', 'S3', 'S4', 'S5']);
console.log(fa.canAccept('aaaaaaaa'));
如果追求機器最後給出「是」或「不是」的答案,確實是可以將非確定性有限自動機轉換為確定性有限自動機,不過,在稍微複雜一點的運算時,在合併狀態的過程中,狀態集合與相應的規則會暴增,運算速度也會變得緩慢。
雖然每次都能猜中的神機不存在,然而,如果能忍受瞎猜,或者說是可以接受可能性的結果,以非確定性機器的概念來打造只求得可能性的實際機器,還是有其設計上的簡單與速度上的優點(也許一次就猜中)。
非確定性機器便於設計,因而也可以一開始以非確定性機器構思,之後逐步考量,試著將之轉換為確定性的機器,並評估其可行性(時間、狀態個數等考量是否能夠容忍)。
如果借助圖靈機的能力,可以在套用非確定性有限自動機規則的過程中,收集接下來的可能狀態,在輸入完成後,看看最後收集到的可能狀態中,是否包含接受狀態,透過這種方式來模擬非確定性有限自動機,好處是可以直接撰寫非確定性有限自動機的規則,而不用將之轉換為確定性有限自動機規則。
不過要小心的是,收集接下來的可能狀態並不等於合併狀態,接下來的模擬程式也已經不是有限狀態自動機了,因為它用到了 Set 這個記憶裝置,只是個方便驗證規則撰寫是否正確的程式:
class Rule {
constructor({state, input, nextState}) {
this.state = state;
this.input = input;
this.nextState = nextState;
}
isApplicableTo(state, input) {
return this.state === state &&
this.input === input;
}
}
class Manual {
constructor(rules) {
this.rules = rules;
}
collectStates(states, input) {
return Array.from(states)
.map(state => {
return this.rules.filter(rule => rule.isApplicableTo(state, input))
.map(rule => rule.nextState);
})
.reduce((acc, states) => acc.concat(states));
}
freeMoves(states) {
let frees = new Set(
this.collectStates(states, null)
);
return frees.size === 0 ? states : frees;
}
next_states(states, input) {
return new Set(
this.collectStates(this.freeMoves(states), input)
);
}
}
class Machine {
constructor(manual, states, acceptables) {
this.manual = manual;
this.states = new Set(states);
this.acceptables = acceptables;
}
canAccept(text) {
let manual = this.manual;
function digest(states, txt) {
if(states.size === 0 || txt.length === 0) {
return Array.from(states);
}
return digest(manual.next_states(states, txt[0]), txt.slice(1));
}
return digest(this.states, text).map(state => this.acceptables.includes(state))
.some(acceptable => acceptable);
}
}
let manual = new Manual([
new Rule({
state : 1,
input : null,
nextState : 2
}),
new Rule({
state : 1,
input : null,
nextState : 4
}),
new Rule({
state : 2,
input : 'a',
nextState : 3
}),
new Rule({
state : 3,
input : 'a',
nextState : 2
}),
new Rule({
state : 4,
input : 'a',
nextState : 5
}),
new Rule({
state : 5,
input : 'a',
nextState : 6
}),
new Rule({
state : 6,
input : 'a',
nextState : 4
})
]);
let machine = new Machine(manual, [1], [2, 4]);
console.log(machine.canAccept('aaaaa'));
再次強調,這個程式在行為上看似非確定性有限自動機,因為它的規則不是確定性的,然而其實不是非確定性有限自動機,因為程式借助了圖靈機的儲存裝置,才使得結果一定能給出「是」或「不是」的答案,如果不使用圖靈機的儲存裝置,是不可能打造出這種機器的!