

四足機器人的電路連接不難,只是小心別接錯就是了,而且要注意的是,要靠控制板上的 5V 接腳輸出之電流,就想驅動 12 顆馬達是不夠的,基本上保守的作法是,用一個電源接到 USB 或電源輸入插座,以提供控制板電流,而另一個電源供應馬達電流。
不過,我只使用一個電源,這個電源既供應控制板電流,也供應馬達所需的電流(馬達不是接到控制板上的 5V 接腳),這樣可以很快地耗用掉兩顆 3.7V 14500 可充電鋰電池的電力,持續運轉差不多半個多小時就可以用光光吧!… XD
電路連接方式
想要只使用一個電源來同時供應控制板與馬達所需的電力,就結論而言,就是將 12 顆馬達的 VCC 連接在一起,12 顆馬達的 GND 也連接在一起;接著電池盒的正極與馬達 VCC 端以及控制板的 Vin 連接在一起;而負極與馬達的 GND 以及控制板的 GND 腳位連接在一起。
在連接方面,我使用了附有小型麵包板的原型擴充板,因此,以下線路圖也使用麵包板示範:
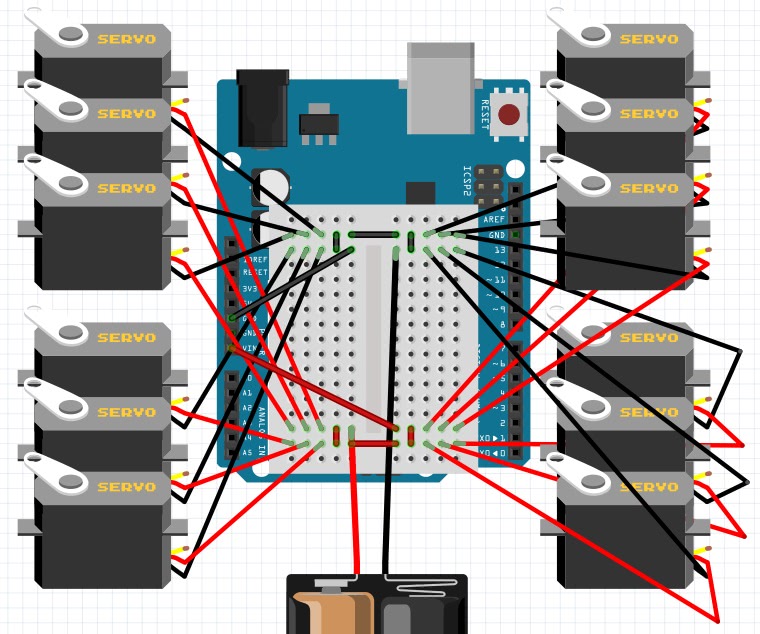
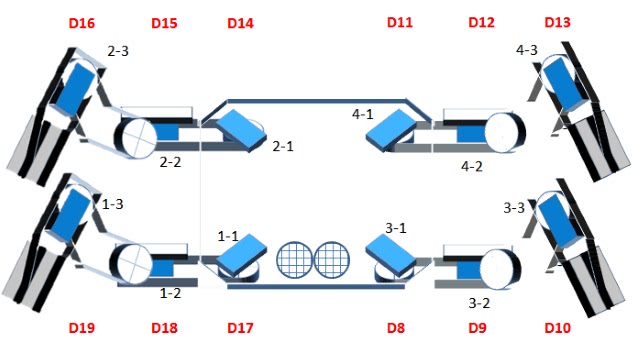
剩下的馬達訊號線,就依〈廢材四足機器人(一)修修補補成廢材〉中列出馬達編號的圖中,依編號做對應的腳位連接:
其實組好之後,我就先做了個讓機器人上上下下的小測試,看看運作是否正常,一方面看看木頭撐不撐得住,然後,針對一些脆弱的地方,繼續修補 … XD

程式設計的方面,之後再來談,現在要先探討一下足態設計!也就是如何維持機器人的靜態平衡,以及行進的方式!
抬腿的靜態平衡 V2
其實我一開始是想做成六足,後來想偷懶少切割些木頭,就做成四足了,不過,後來才想到不對,這樣反而無法偷懶,因為四足的靜態平衡比六足難,這 … 頭都洗下去了 … 只好認真地思考一下足態怎麼設計了 … 一開始轉彎是設計成這樣 …

觀看影片的話,乍看還蠻像一回事的,不過,仔細看,它其實腳並沒有抬起來,打開電腦喇叭的話,你就可以聽到腳拖行在地面上發出的聲音,以下這個也是 …

前進或後退時,腳沒有真正抬起來,根本就是在滑行,如果只能在地面上滑行,那就只能在摩擦力小的地面行動,而且其實也不需要讓每一隻各有三個自由度了,這個算是失敗的版本,姑且就稱為 V1 吧!
其實,我有試著讓腳抬起來,不過一直沒成功,一直都是在地面上拖行,就這麼又放上了好幾天 … 才想到可以增加腳底的接觸寬度,接下來要談的,就暫時稱為 V2 ...
仔細看上頭的影片,腳底只有一隻竹筷,而〈廢材四足機器人(一)修修補補成廢材〉中,我談到要在腳底各黏貼了四小段竹筷,這是後來為了增加靜態平衡能力才加上去的 …
對於足型機器人,想維持靜態平衡最簡單的方式,就是三腳著地時三個落地點呈三角型,然後一腳抬起,其實想要以兩腳維持平衡也不是不行,不過容易倒,看過有人在腳底直接加個大圓盤,這省事多了,不過我不喜歡,感覺有點醜(是說現在修補成這樣也稱不上帥了) …
還沒將腳底擴充為四個竹筷前,其實我也試著以三腳著地的方式來抬腿,像是 …

看起來好像是成功了,不過,其實也很不穩,一不小心就容易腳滑傾向錯誤的一邊,後來才想到,將腳底擴充為四個竹筷,幸好機器人本身重心算低,只要將腳底擴充為四個竹筷,靜態平衡就比較容易做,不用加個大圓盤,看來也還算帥…XD
從前面抬腿的影片中也可以看到,要先將想抬起的腿對角線另一邊降低,讓重心轉移,這樣會讓抬腿更容易一些,不轉移重心的話,雖然也可以抬腿,不過稍有震動,重心一偏向抬起的腿那邊,就會倒下去。
轉彎與前進足態設計 V2
轉彎很容易設計,讓馬達 1-1、2-1、3-1、4-1 都逆時針轉,四足機器人就會順時針轉,但此時腳還留在原也,因此,此時逐一抬腿,讓四隻腳再度成為對角線,如底下影片示範:

前進時的足態比較複雜一些,實際上對前進有幫助的,只有腿在側面的運動,因此先讓右後腿抬起逆時針 45 度後著地,接著右邊兩腳同時往後推,如此四足的右半邊就會前進,然後,右前腿逆時針 45 度後著地,此時四隻腳又是成為對角線。
同理,想要機器人左半邊前進,就是先讓左後腿抬起順時針 45 度後著地,接著左邊兩腳同時往後推,如此四足的左半邊就會前進,然後,左前腿順時針 45 度後著地,此時四隻腳又是成為對角線,如此反復不斷,就會讓機器人前進,連續動作就如上面的影片中看到的。
嚴格來說,當一邊的兩腳往後時,另一邊兩腳也要做若干轉動,這樣另一邊兩腳才不會被略為拖行,我省略了這部份,在不是太粗糙的地面上,目前的動作應該足夠應付,如果要在更複雜的地面上行進,那麼這部份的考量應該就是必要的。
接下來就剩程式的部份了 … 其實有以上說明,看 Github 上的程式碼 應該就會清楚多了,不過,我還是準備了獨立的一篇來說明一下程式怎麼寫的,你可以試著先依以上說明寫寫看,再參考我下一篇要說明的版本!