

之所以稱為不磕頭機器人,是因為在這之前,做了一隻磕頭機器人 … XD

說到它為什麼會磕頭,因為它的腳根本沒真正撐起身體(EV3 主機),底下的馬達頂著地面,靠著腳的運動在滑行罷了,因此,後來又做了改進,才有了這不磕頭機器人:

同樣地,你可以下載 Crab.lxf 並使用 LDD 來觀看,或 線上觀看 組裝機器人的過程:
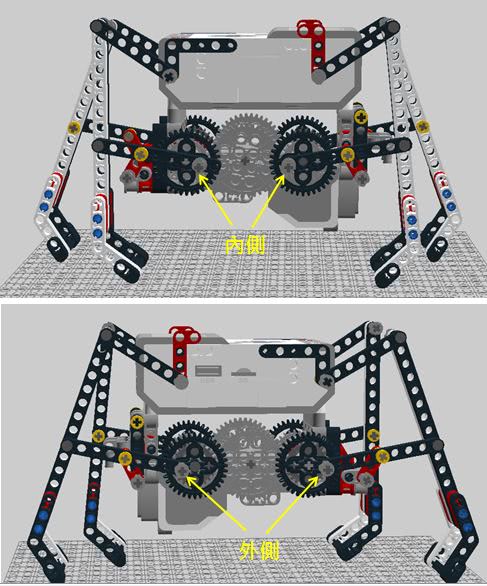
這個不磕頭機器人只使用一個馬達,藉由齒輪帶動,令四隻腳呈現移動時彼此搭配的狀態,組裝時要注意的地方在於,當上圖中黑齒輪(Double Conical wheel)上兩個組裝點(Bush for cross axle)都是在內側同一線上時,另一邊的黑齒輪上兩個組裝點都是在外側同一線上,也就是如下圖:
對於四足機器人,在行走時若要能不跌倒,基本作法之一是三點平衡,也就是運動時最少有三隻腳著地而一隻腳抬起,例如,我製作過的 〈廢材四足機器人〉就是如此。
在〈EV3 Tutorial(14)從前從前有一隻龍〉中,實際上也是運用了三點平衡方式,運動時最少都會有一隻腳與兩個輪子接觸地面,也就是說,輪子只是用來掩護靜態平衡的做法,同樣地,該文中「第一次用 EV3 做的恐龍」,也只是用尾巴在掩護靜態平衡的做法而已。
因此,我這次的目的,是想試著作出運動時就算最少只有兩隻腳接觸地面,也不會跌倒的機器人,這用 EV3 做有個難點,EV3 主機很重,我以前試著做過幾次類似的,總是因為 EV3 主機 太重而失敗。
我後來的靈感來自在在高雄科工館看到的 Spider Robot 小玩具,不過它用了八隻腳,我觀察了一下它的動作,運動時最少會有四腳著地,不過,我想到的是,它的腳比較長,如果同時也將腳底加寬,應該可以增加靜態平衡能力。
只不過,一開始的磕頭機器人還是因為主機重量,底下的馬達頂著地面,因而同時間又會有兩隻腳著地,因此也是三點平衡的方式,加上腳長度沒有估量好,也才造成了行進時不停搖擺的狀態。
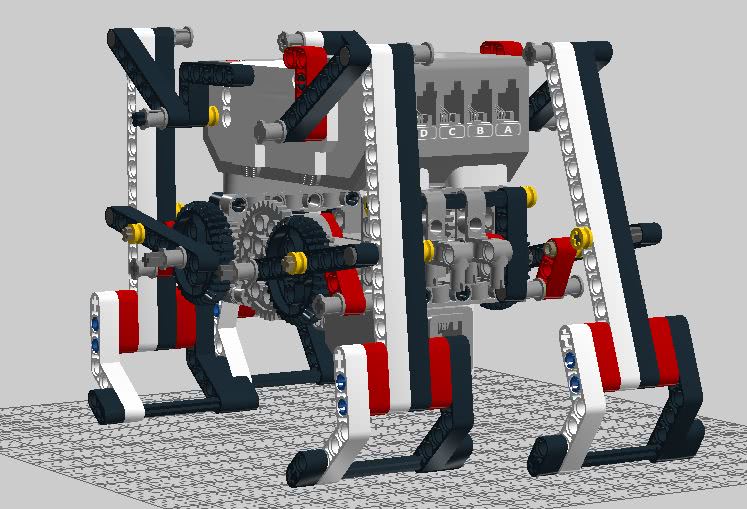
因此,後來的不磕頭機器人,將整個身體(EV3 主機)拉高,不過,變得容易跌倒,後來我將擔任腳的兩根長積木(Technic 15m beam)併在一起(也就是下圖中黑白併在一起的長積木),並往內側靠(也就是儘量往重心靠),總算是解決了這問題。
因為只有一個馬達,所以只能兩個方向運動,其實應該可以用一個馬達控制一側的兩條腿,另一個馬達控制另一側的兩條腿,這樣的話,就能有轉彎的動作,當然,記得齒輪運動要配合好,這之後有機會我再來做做看,你也可以試著做做看喔!